图3是仿真运行得到的制动带与制动鼓之间接触面积的变化曲线.开始时3个工况的接触面积曲 线都出现不同程度的抖动,反转工况抖动持续时间较长,这是由于制动鼓反转,制动鼓有使制动带远 离接触面的趋势,因而抖动较明显;随着制动力的 增大,制动带克服制动鼓反转所引起的阻力,平稳 地贴向接触面,抖动消失.抖动消失后,3个工况 的接触面积开始逐渐增大.
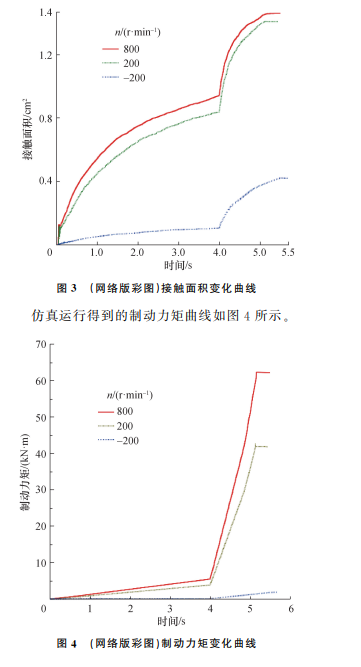
分析图4,从第1个分析步即4s开始,制动鼓正转产生的制动力矩明显大于反转产生的制动力 矩,且增长速度较快,这也可以从接触面积的变化得到印证,2个正转工况对应的接触面积远大于反 转工况,这是由于制动鼓正转有助于使制动带紧贴制动鼓,从而产生自增力效应.第1个分析步前期 即4.0~4.1s之间,2个正转工况制动力矩接近, 之后逐渐出现差距,反映到图3上,4.1s时,2个 正转工况接触面积相近,之后二者之间的差距越来越大.对于反转工况,第1个分析步期间,制动力 矩缓慢增大,但幅度远低于2个正转工况.
第2个分析步时,正转2个工况制动鼓转速降 为零,动态过程结束,此时2个工况都出现了1个 尖峰,制动力矩出现了超调,又迅速下降到稳态 值,之后一直保持稳态值直至全过程结束.这一阶 段正转工况的制动力矩远远大于反转的制动力矩, 反转的制动力矩继续保持缓慢增长.反映到接触面 积上,正转2个工况的接触面积达到或接近最大值, 制动带利用率高,制动可靠性好,而反转对应的接触面积远低于正转,因此产生的制动力矩有限.
有限元建模可以分析制动带的动态力矩特性, 然而未计入制动时动水升力及制动力加载速度等因 素,也没有考虑到制动过程中驱动电机维持恒定转速而带来的电机转矩的影响.关于制动带动态力矩 特性的进一步研究,还有待于在台架实验中来完成.


