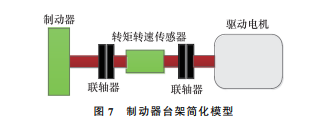
图7是台架简化模型,动态制动力矩 Tdbrake可 估算如下:
其中:Tmotor是 转 矩 转 速 传 感 器 测 得 的 电 机 转 矩; Ibrake是制动鼓的等效转动惯量,其值由实际测量得 到;ωmotor是驱动电机转动的角速度.